
Исследователи университета Билефельда в Германии сумели скопировать движения ног насекомых — и теперь созданный ими робот Гектор двигает каждой ногой отдельно, в зависимости от рельефа местности.

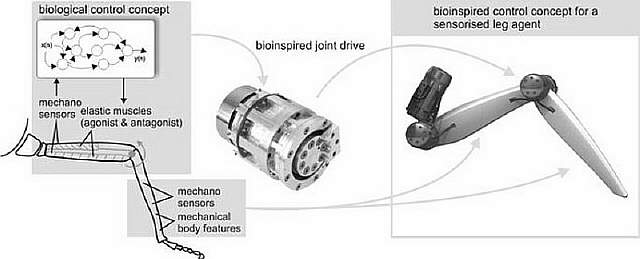
Чтобы добиться такого результата робототехники снабдили ножки шестилапого робота в общей сложности 18-ю эластичными сочленениями, которые позволяют ему справляться с неровными поверхностями. В каждой ножке робота имеется датчик, который даёт ему обратную связь о контакте с землёй и позволяет приподнимать ножки перед небольшими препятствиями.
Самой большой сложностью стала разработка системы управления, координирующей движение всех ног робота в сложных условиях.
Изготовленный из углеволокна и пластика, экзоскелет робота весит всего 12 кг, но может нести нагрузку более 30 кг — что почти втрое больше собственного веса робота.
Учёные планируют собрать прототип, который сможет использовать для зондирования окрестностей телекамеры и тактильные щупы. Это даст ему возможность видеть и чувствовать препятствия на своем пути, хотя интеграция всех этих датчиков в эффективно работающую систему достаточно сложна.
Создатели робота считают, что он может быть использован в разработке новых типов автономных поисковых и аварийно-спасательных роботов, которые смогут перевозить груз по труднопроходимой местности или помогать учёным в исследовании других планет.
Комментариев нет:
Отправить комментарий